Token级优化为何能对齐序列级奖励?阿里耗费数十万GPU时,揭秘LLM强化学习稳定之道
用强化学习(RL)来“调教”大模型,使其在复杂任务上表现更佳,已是行业共识。但一个棘手的问题始终困扰着研究者们:训练过程极其不稳定,常常像坐过山车。
ArXiv URL:http://arxiv.org/abs/2512.01374v1
这背后隐藏着一个根本矛盾:我们通常基于模型生成的完整序列(如一个完整的答案)给予奖励,但在优化时,却是在逐个Token的粒度上调整模型。
这种“序列级奖励”与“Token级优化”的错位,真的科学吗?它会不会就是导致训练不稳定的罪魁祸首?
来自阿里巴巴的研究者们,通过一篇新论文给出了一个深刻的数学解释。他们耗费了数十万GPU小时,在一个300亿参数的MoE模型上进行了详尽实验,不仅揭示了其中的原理,还提供了一套稳定RL训练的实用“配方”。
序列奖励 vs. Token优化:一个理论近似
直接优化期望的序列级奖励 $ \mathcal{J}^{\text{seq}}(\theta) $ 非常困难。因为一个长序列的生成概率 $ \pi_{\theta}(y \mid x) $ 往往是一个极小的数,这会导致梯度计算时出现巨大的数值范围和方差,让优化过程难以控制。
\[\nabla_{\theta}\,\mathcal{J}^{\text{seq}}(\theta) = \mathbb{E}_{y\sim\mu_{\theta_{\text{old}}}}\left[\frac{\pi_{\theta}(y \mid x)}{\mu_{\theta_{\text{old}}}(y \mid x)}\,R(x,y)\sum_{t=1}^{ \mid y \mid }\nabla_{\theta}\log\pi_{\theta}(y_{t} \mid x,y_{<t})\right]\]这篇论文的核心洞见在于,它指出我们常用的Token级优化目标 $ \mathcal{J}^{\text{token}}(\theta) $,实际上是序列级目标 $ \mathcal{J}^{\text{seq}}(\theta) $ 的一种一阶近似。
\[\nabla_{\theta}\,\mathcal{J}^{\text{token}}(\theta)=\mathbb{E}_{y\sim\mu_{\theta_{\text{old}}}}\left[\sum_{t=1}^{ \mid y \mid }\frac{\pi_{\theta}(y_{t} \mid x,y_{<t})}{\mu_{\theta_{\text{old}}}(y_{t} \mid x,y_{<t})}\,R(x,y)\,\nabla_{\theta}\log\pi_{\theta}(y_{t} \mid x,y_{<t})\right]\]简单来说,只有当目标策略 $ \pi_{\theta} $ 与采样策略 $ \mu_{\theta_{\text{old}}} $ 非常接近时,这两个目标的梯度才近似相等。这意味着,通过优化Token级目标,我们才能够有效地提升真正的序列级奖励。
逼近有效的两大基石
那么,如何保证这种“近似”是有效的呢?研究指出,关键在于最小化两个核心差异:
-
训练-推理差异(Training-Inference Discrepancy):即训练系统和推理引擎在计算上的细微差别。即使参数完全相同,这两个引擎的输出也可能不一致,尤其是在复杂的硬件和软件栈上。
-
策略陈旧度(Policy Staleness):在进行多次梯度更新时,用于采样数据的策略(旧策略 $ \theta_{\text{old}} $)和正在优化的策略(新策略 $ \theta $)之间的差距。差距越大,近似就越不成立。
这个公式清晰地告诉我们,为了让Token级优化有效,必须同时控制好这两个“变量”。
MoE模型的特殊挑战与“路由回放”
对于混合专家模型(Mixture-of-Experts, MoE)来说,问题变得更加复杂。
MoE模型在生成每个Token时,都会动态地选择一部分“专家”来参与计算。这种动态的专家路由(Expert Routing)机制,为上述两个差异引入了新的变数。
例如,策略陈旧不仅体现在模型参数的变化,还体现在专家选择路径的改变上,这会急剧地放大策略间的差异。
为了解决这个问题,研究者引入了路由回放(Routing Replay)技术。其核心思想是在策略优化期间,固定住生成数据时所选择的专家路径,让MoE模型暂时像一个稠密模型一样被优化。
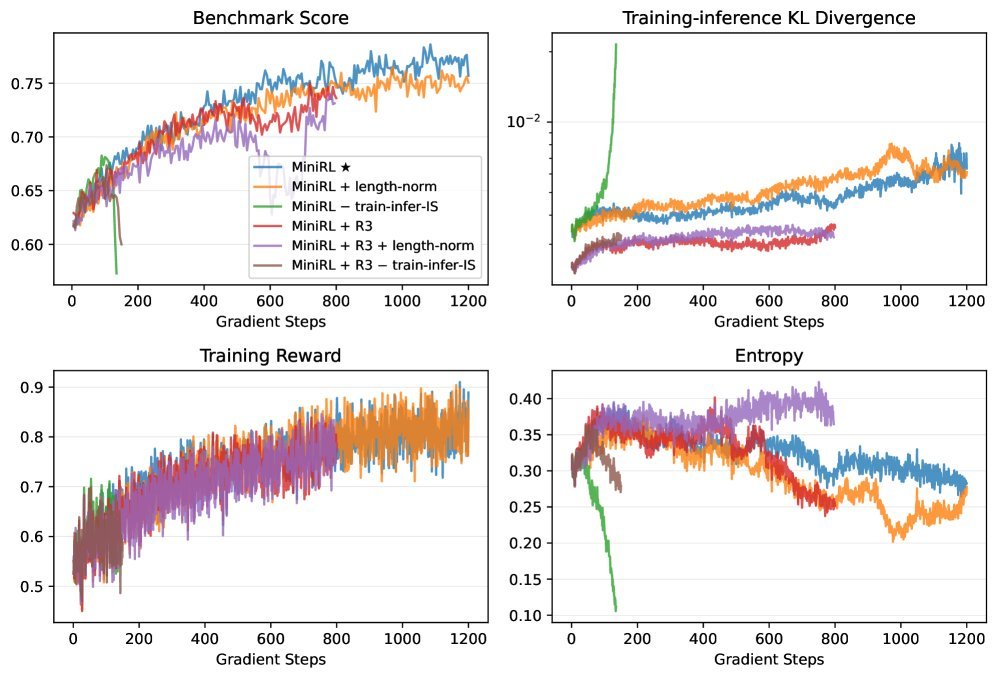
如上图所示,在On-policy(即每次更新都用新数据)训练中,遵循理论的基线方法(MiniRL)表现最为稳定。而移除重要性采样(wo/ train-infer-is)或引入不合理的长度归一化(w/ length-norm)都会破坏近似的有效性,导致训练崩溃。
实验验证:稳定才是硬道理
为了加速训练,我们通常会采用Off-policy的方式,即用一批数据进行多次梯度更新。但这会不可避免地增加“策略陈旧度”。实验结果表明,此时稳定训练的秘诀在于Clipping和路由回放的结合。
-
Clipping:限制单步更新的幅度,直接控制策略陈旧度。
-
路由回放(Routing Replay):通过固定专家路径,同时降低了训练-推理差异和策略陈旧度带来的不确定性。
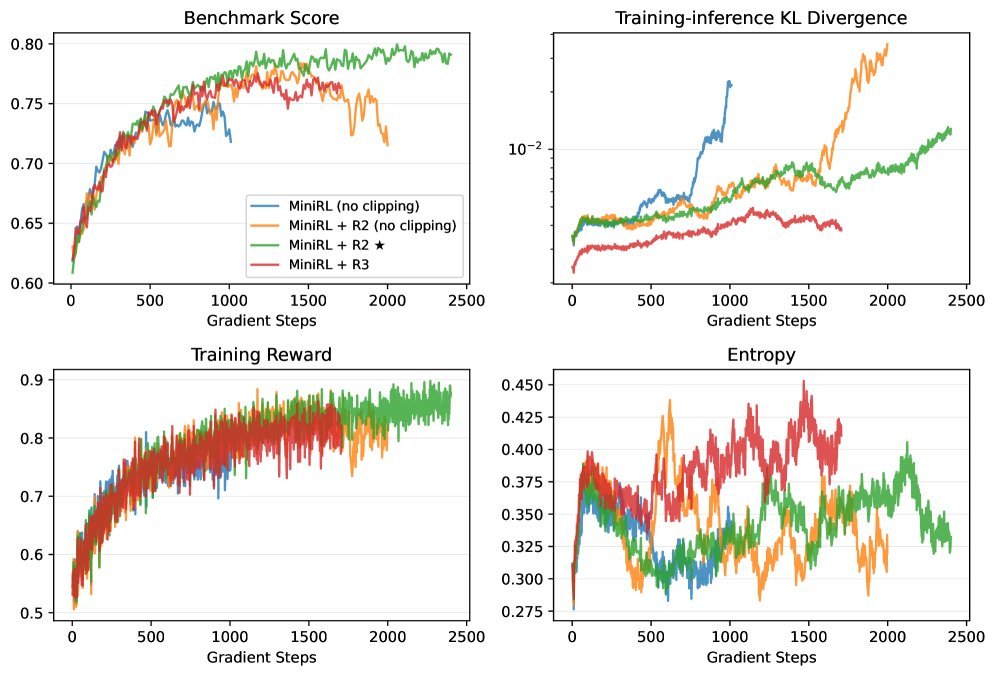
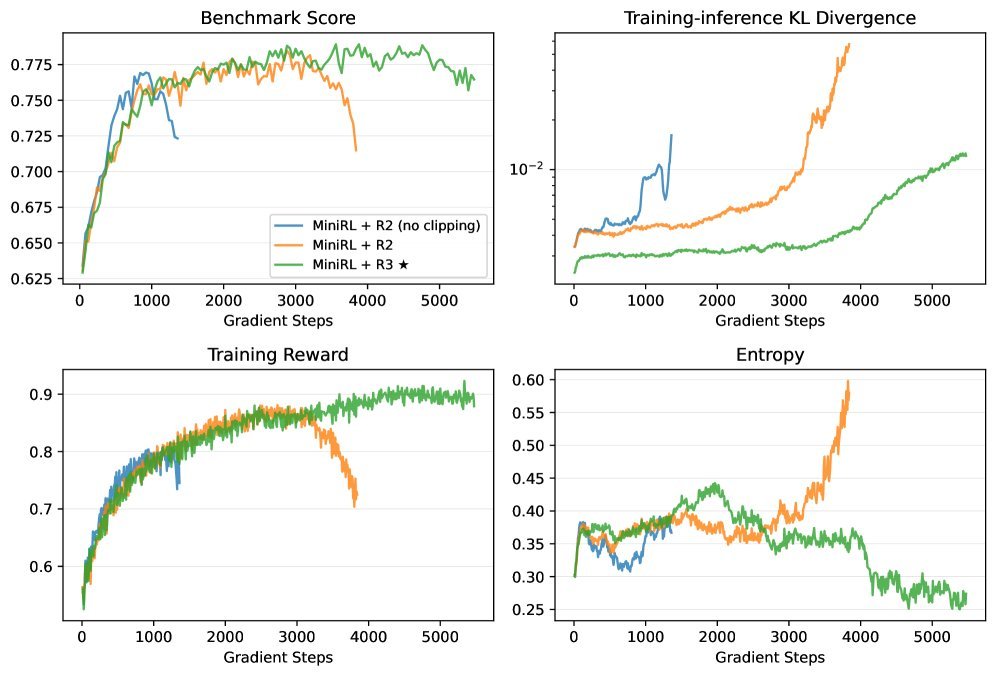
上图展示了在Off-policy(N=2,即每批数据更新2次)设定下,不同策略的稳定性。可以看到,简单的MiniRL(蓝色)很快就崩溃了。而结合了路由回放(R2/R3)和Clipping的策略(绿色和紫色)则表现出优异的稳定性,并取得了最好的性能。
当Off-policy的程度加剧(N=4或N=8),这种稳定性差异更加明显。
稳定训练的终极价值
这项研究还有一个非常振奋人心的发现:一旦找到了稳定的RL训练“配方”,模型的初始状态(冷启动)对最终性能的影响会大大减小。
研究者们用三个不同的前沿模型蒸馏出的数据作为冷启动,使用稳定的“MiniRL + R2”配方进行训练。
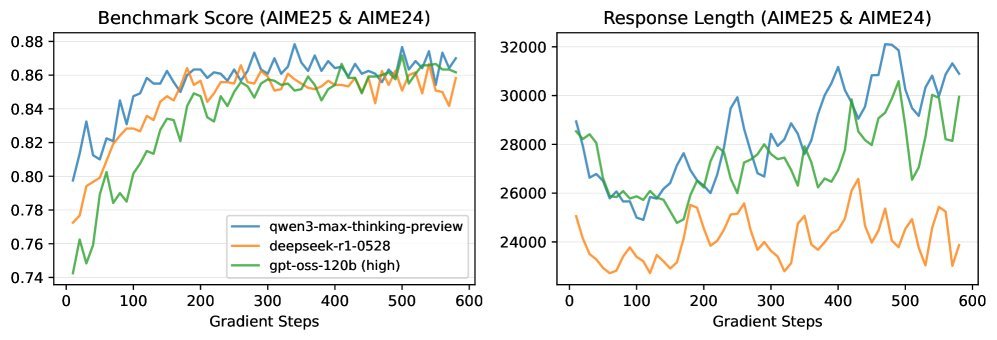
结果如上图所示,尽管起点不同,但经过足够长的稳定训练后,三个模型最终达到了非常接近的性能水平。
这意味着,未来的研究可以更专注于RL算法和训练过程本身,而不必过度纠结于“如何获得一个完美的SFT初始模型”。
结论
这篇论文为“用Token级优化实现序列级目标”这一RL for LLMs的普遍实践,提供了坚实的理论基础。它明确了训练稳定性的两个关键支柱:减小训练-推理差异和控制策略陈旧度。
通过在300亿MoE模型上进行的超大规模实验,该研究不仅验证了理论的正确性,还为业界提供了一套行之有效的稳定训练方案,特别是针对MoE模型的路由回放技术,展现了其在稳定训练中的关键作用。
稳定,是成功规模化RL的决定性因素。有了这份“稳定之道”的指引,我们离充分释放大模型潜力又近了一步。