Think Outside the Policy: In-Context Steered Policy Optimization
-
ArXiv URL: http://arxiv.org/abs/2510.26519v1
-
作者: Yunfang Wu; Saiyong Yang; Chenming Tang; Hsiu-Yuan Huang; Weijie Liu
-
发布机构: Peking University; Tencent
TL;DR
本文提出了一种名为“上下文引导策略优化” (In-Context Steered Policy Optimization, ICPO) 的新型强化学习框架,该框架利用大推理模型 (Large Reasoning Models, LRM) 固有的上下文学习 (In-Context Learning, ICL) 能力,仅通过现有数据集生成专家指导,从而在不依赖更强专家模型的情况下,有效提升模型的探索范围和推理性能。
关键定义
本文提出或沿用了以下对理解论文至关重要的核心概念:
-
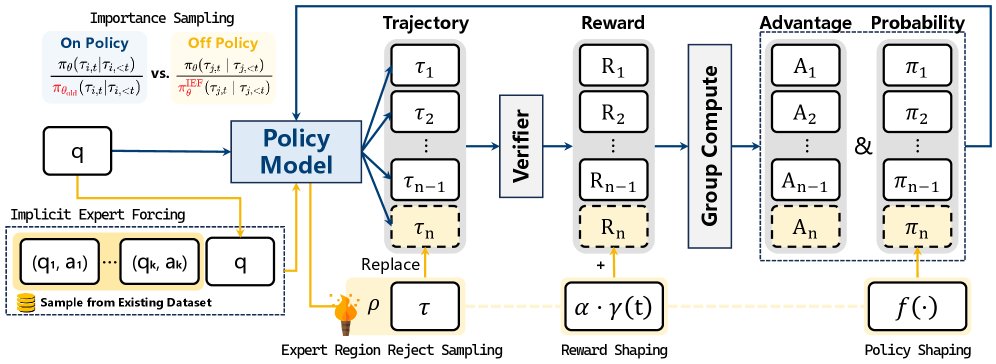
上下文引导策略优化 (In-Context Steered Policy Optimization, ICPO): 本文提出的统一强化学习框架。它通过“隐式专家强制”来利用模型的上下文学习能力,生成高质量的探索轨迹,并结合“专家区域拒绝采样”和“退火专家奖励塑造”技术来稳定训练过程,从而提升大推理模型的性能。
-
隐式专家强制 (Implicit Expert Forcing, IEF): ICPO 的核心机制。它不依赖于一个外在的、更强的专家模型,而是通过在模型的输入中提供少量高质量的示例(few-shot ICL),来“隐式地”引导当前模型生成偏向专家行为的轨迹。这些轨迹被用作异策略 (off-policy) 数据,以扩大探索空间。
-
专家区域拒绝采样 (Expert Region Reject Sampling, ERRS): 一种为稳定训练而设计的过滤机制。它定义了一个“专家区域”,即只有那些通过 IEF 生成且奖励高于预设阈值的“高质量”轨迹才会被接纳并用于模型更新,从而防止低质量或有噪声的轨迹对策略优化产生负面影响。
-
退火专家奖励塑造 (Annealed Expert-Bonus Reward Shaping, RS): 一种奖励调整策略。它在训练早期为被采纳的专家轨迹提供一个额外的、随训练步数线性衰减的奖励加成。这旨在训练初期鼓励模型模仿专家行为,而在后期逐渐减少依赖,促进模型自主优化。
-
组相对策略优化 (Group Relative Policy Optimization, GRPO): 本文方法所基于的一种高效的强化学习优化算法。它通过对一批轨迹(一个组)的奖励进行归一化来计算优势函数,避免了使用额外的价值网络,适用于大语言模型。
相关工作
当前,利用可验证奖励的强化学习 (Reinforcement Learning from Verifiable Rewards, RLVR) 在提升大推理模型 (LRM) 的复杂推理能力方面取得了显著进展。其中,基于 GRPO 的方法是主流,但其严重依赖于同策略 (on-policy) 采样,即生成的轨迹局限于当前策略的分布,导致探索范围狭窄,轨迹多样性不足,容易陷入局部最优解。
为了解决这一瓶颈,现有研究尝试将监督微调 (Supervised Fine-Tuning, SFT) 与强化学习 (RL) 相结合。一些方法通过交替进行 SFT 和 RL 更新,或将 SFT 数据作为异策略样本融入 RL 训练,来扩展探索空间。然而,这些方法普遍存在一个关键问题:它们通常依赖于由一个更强的“专家”LRM 生成的 SFT 数据。这种依赖不仅带来了高昂的计算成本,而且这些先进的专家模型往往难以获取。
本文旨在解决上述问题,即如何在不依赖外部专家模型的情况下,有效扩大 LRM 在 RL 训练中的探索范围,以提升其推理能力和训练稳定性。
本文方法
本文提出了一个名为 ICPO 的统一强化学习框架,其核心思想是利用模型自身的上下文学习能力来生成专家指导,从而避免了对外部专家模型的依赖。该框架主要包含三个关键组件:隐式专家强制 (IEF)、专家区域拒绝采样 (ERRS) 和退火专家奖励塑造 (RS)。
用 Few-Shot ICL 实现隐式专家强制
传统方法依赖“显式专家强制”,即通过模仿学习或KL散度约束,使当前策略对齐一个独立的专家模型 $\pi_{\phi}$,这需要梯度计算和额外的专家模型。
本文发现,小样本上下文学习 (Few-shot ICL) 本身就是一种有效的、无梯度的专家条件推理方式。通过在输入中加入高质量的示例,模型的输出分布会向专家行为靠拢,从而产生更高质量和更多样化的轨迹。 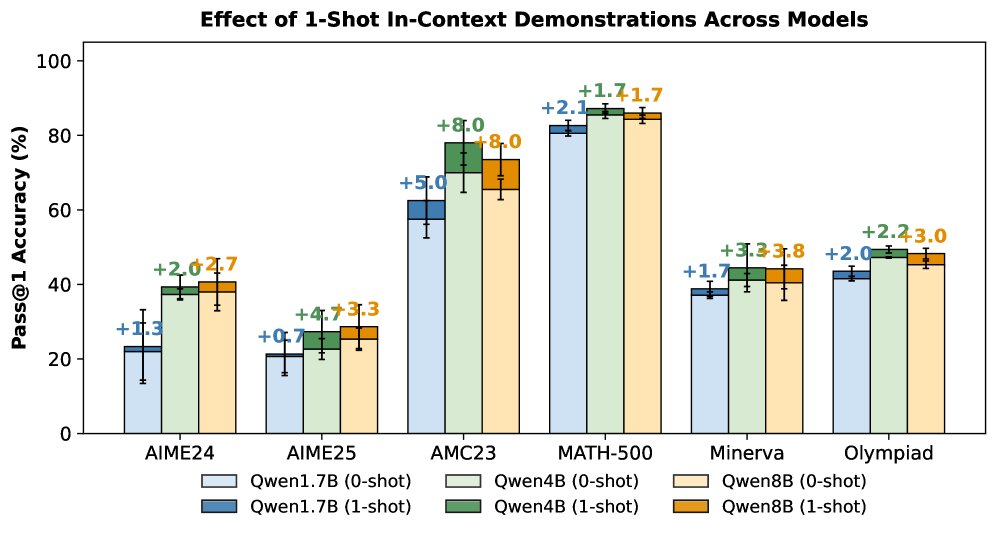

这种由 ICL 引导产生的策略分布可被形式化为:
\[\pi_{\theta}^{\text{IEF}}(\tau\mid q):=\pi_{\theta}(\tau\mid[\mathcal{D};q])=\pi_{\mathcal{F}}(\tau\mid q;\vartheta)\]其中,$\mathcal{D}$ 是上下文示例,它隐式地生成了一个编码专家行为的任务向量 $\vartheta$。这相当于在不修改模型参数 $\theta$ 的情况下,引导模型生成“专家级”的输出,本文将此过程称为 隐式专家强制 (IEF)。
混合策略 GRPO
为了将 IEF 产生的专家级探索融入训练,ICPO 扩展了 GRPO 算法,构建了一个 混合策略 (Mixed-Policy) GRPO。在每次迭代中,模型会生成 $N_{\text{on}}$ 条同策略轨迹 $\tau_{i}\sim\pi_{\theta_{\text{old}}}$ 和 $N_{\text{off}}$ 条通过 IEF 生成的异策略轨迹 $\tau_{j}\sim\pi_{\theta_{\text{old}}}^{\text{IEF}}$。
所有这些轨迹的奖励被放在一起进行组归一化,以计算优势函数 $\hat{A}_{i}$:
\[\hat{A}_{i}=\frac{R(\tau_{i})-\text{mean}(G_{\text{on}}\cup G_{\text{off}})}{\text{std}(G_{\text{on}}\cup G_{\text{off}})}\]混合策略的目标函数结合了同策略和异策略两部分:
\[\begin{aligned} \mathcal{J}_{\scriptscriptstyle\text{Mixed}}(\theta) &= \underbrace{\mathbb{E}_{\tau\sim\pi_{\theta_{\text{old}}}}}_{\text{on-policy}}\Bigg[\frac{1}{ \mid \tau \mid }\sum_{t=1}^{ \mid \tau \mid }\operatorname{CLIP}\big(r_{t}(\theta),\,\hat{A}(\tau),\,\epsilon\big)\Bigg] \\ &\quad+\underbrace{\mathbb{E}_{\tau\sim\pi_{\theta_{\text{old}}}^{\text{IEF}}}}_{\text{off-policy}}\Bigg[\frac{1}{ \mid \tau \mid }\sum_{t=1}^{ \mid \tau \mid }\operatorname{CLIP}\big(\hat{r}_{t}(\theta),\,\hat{A}(\tau),\,\epsilon\big)\Bigg], \end{aligned}\]这使得模型既能在当前策略附近进行微调(利用),也能朝 IEF 指引的专家区域进行探索。这种方法是“自给自足”的,因为它仅使用当前模型 $\pi_{\theta}$ 和现有数据集,无需外部专家模型。
专家区域拒绝采样 (ERRS)
为了防止低质量的 IEF 轨迹干扰训练,ICPO 引入了 专家区域拒绝采样 (ERRS)。首先定义一个“专家区域” $\mathcal{E}_{\text{exp}}$,只包含那些由 IEF 生成且奖励值高于特定阈值 $\delta$ (默认为1.0) 的轨迹:
\[\mathcal{E}_{\text{exp}}=\big\{(x_{\text{exp}},\tau_{j})\ \big \mid \ R(\tau_{j})>\delta\big\}\]然后,通过一个拒绝采样算子 $\rho$,确保只有落入该专家区域的轨迹才对异策略部分的损失函数有贡献。这有效过滤了噪声,保证了更新方向的可靠性。最终的 ICPO 目标函数为:
\[\begin{aligned} \mathcal{J}_{\mathrm{ICPO}}(\theta)=\frac{1}{Z}\Big( &\underbrace{\sum_{i=1}^{N_{\mathrm{on}}}\sum_{t=1}^{ \mid \tau_{i} \mid }\mathrm{CLIP}(r_{i,t}(\theta),A_{i},\epsilon)}_{\text{on-policy objective}} \\ +&\underbrace{\rho\!\left(\sum_{j=1}^{N_{\mathrm{off}}}\sum_{t=1}^{ \mid \tau_{j} \mid }\mathrm{CLIP}(f(\hat{r}_{j,t}(\theta)),\hat{A}_{j},\epsilon)\right)}_{\text{off-policy objective}}\Big), \end{aligned}\]退火专家奖励塑造 (RS)
为了在训练早期更强地引导模型模仿专家行为,ICPO 引入了 退火专家奖励塑造 (RS)。对于那些被 ERRS 采纳的、且答案正确的专家轨迹,其奖励会被赋予一个额外的、随训练步数线性衰减的奖励加成:
\[R_{\text{shaped}}(\tau)=R(\tau)+\alpha\cdot\gamma(t)\]其中,$\gamma(t)=1-\frac{t}{T}$ 是线性衰减调度器,$t$ 是当前训练步数,$T$ 是总步数。这种设计在初期强化专家引导,后期则逐渐放手,让模型自主优化,从而在稳定性和探索性之间取得平衡。
ICPO 训练流程
ICPO 的完整训练流程如下:
- 采样提示: 从数据集中采样一批提示 (prompts)。
- 生成轨迹:
- 同策略: Для каждого подсказки, генерируется $N_{\text{on}}$ траекторий с помощью текущей политики $\pi_{\theta_{\text{old}}}$.
- 异策略 (IEF): 从 MATH 数据集中随机抽取 $k$ 个示例,与提示一起构建上下文,然后用 $\pi_{\theta_{\text{old}}}$ 生成一条 IEF 轨迹 $\tau^{\text{IEF}}$。
- 专家区域过滤与奖励塑造:
- 检查 IEF 轨迹 $\tau^{\text{IEF}}$ 是否正确且奖励大于阈值 $\delta$。
- 如果满足条件,则随机替换一条同策略轨迹,并为其添加退火奖励加成。
- 计算损失与更新:
- 使用混合后的轨迹集,根据公式计算组归一化优势 $\hat{A}$。
- 根据最终的 ICPO 目标函数 $\mathcal{J}_{\mathrm{ICPO}}(\theta)$ 计算总损失。
- 执行梯度下降更新模型参数 $\theta$。
- 更新旧策略: 将 $\pi_{\theta_{\text{old}}}$ 更新为 $\pi_{\theta}$,为下一轮迭代做准备。
实验结论
实验在 Qwen3-1.7B 和 Qwen3-8B 模型上进行,并与基线方法 GRPO 和 LUFFY (使用外部专家模型) 进行了比较。
主要结果
- 总体性能提升: 在分布内 (in-distribution) 的数学推理基准测试中,ICPO 及其变体 ICPO†(包含奖励塑造RS)在两种模型规模上均显著优于基线 GRPO。例如,在 Qwen3-8B 模型上,ICPO 和 ICPO† 分别带来了 2.02 和 2.75 个百分点的平均性能提升。
| 模型 (Qwen3-8B) | NuminaMath | R1-M Hard | MATH | GSM8K | R1-M Easy | 平均 | OPs/tok |
|---|---|---|---|---|---|---|---|
| GRPO | 91.00 | 54.79 | 38.54 | 83.75 | 50.74 | 62.37 | 63.53 |
| ICPO | 92.00 | 55.21 | 43.65 | 86.95 | 51.10 | 65.78 | 66.86 |
| ICPO† | 92.00 | 56.15 | 40.94 | 92.00 | 51.47 | 66.51 | 67.06 |
- 奖励塑造 (RS) 的效果: ICPO† 在专家域数据集 (NuminaMath) 上表现尤为出色,证明了 RS 能够有效加强模型与专家行为的对齐。
- 分布外 (OOD) 泛化能力: 在 OOD 基准测试中,ICPO† 同样保持了与 GRPO 相当或更优的性能,表明该方法在增强特定领域能力的同时,没有损害模型的通用推理能力。
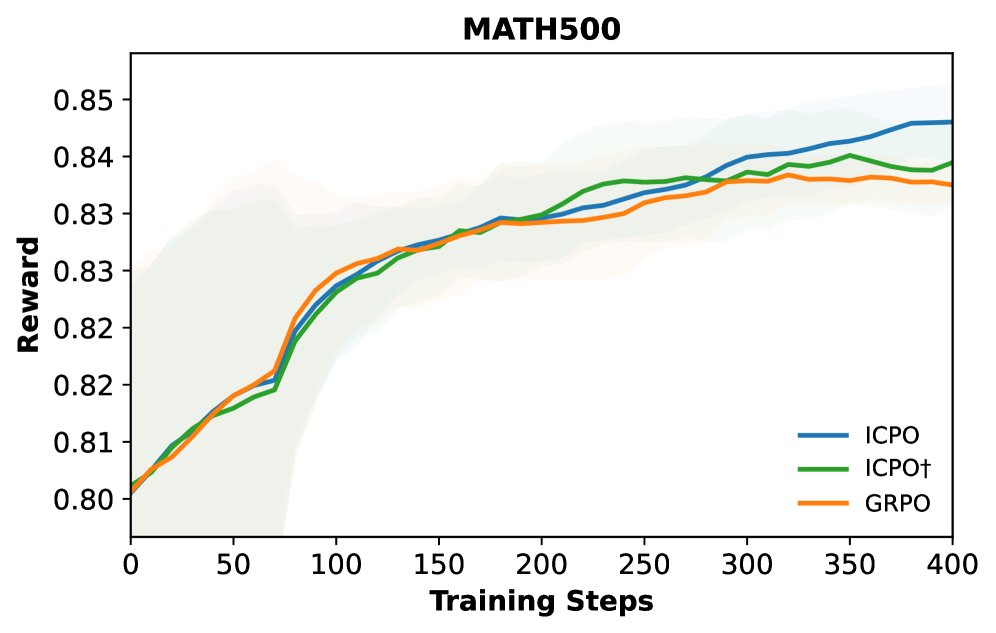
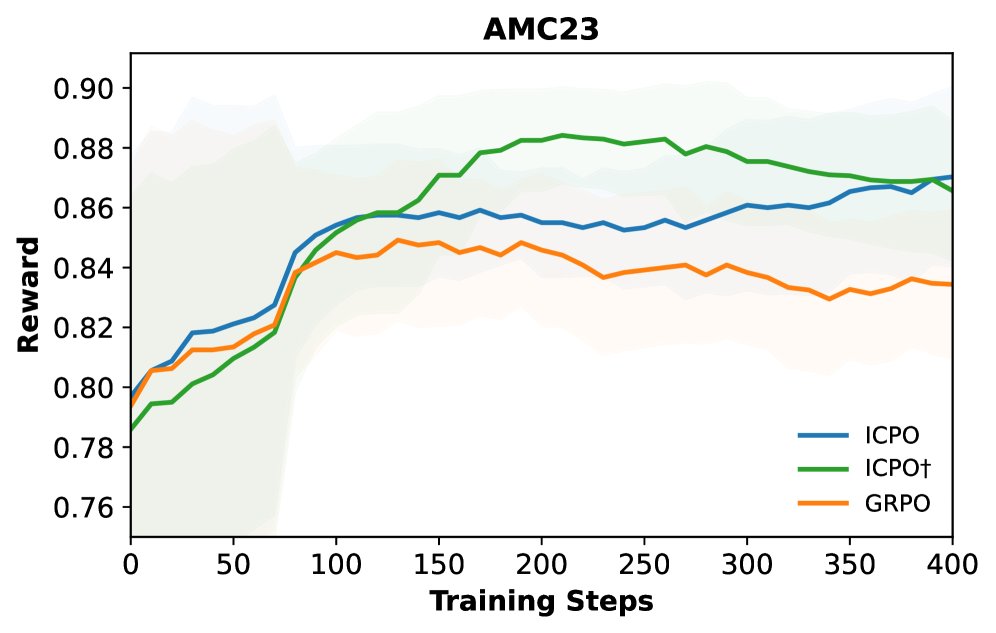
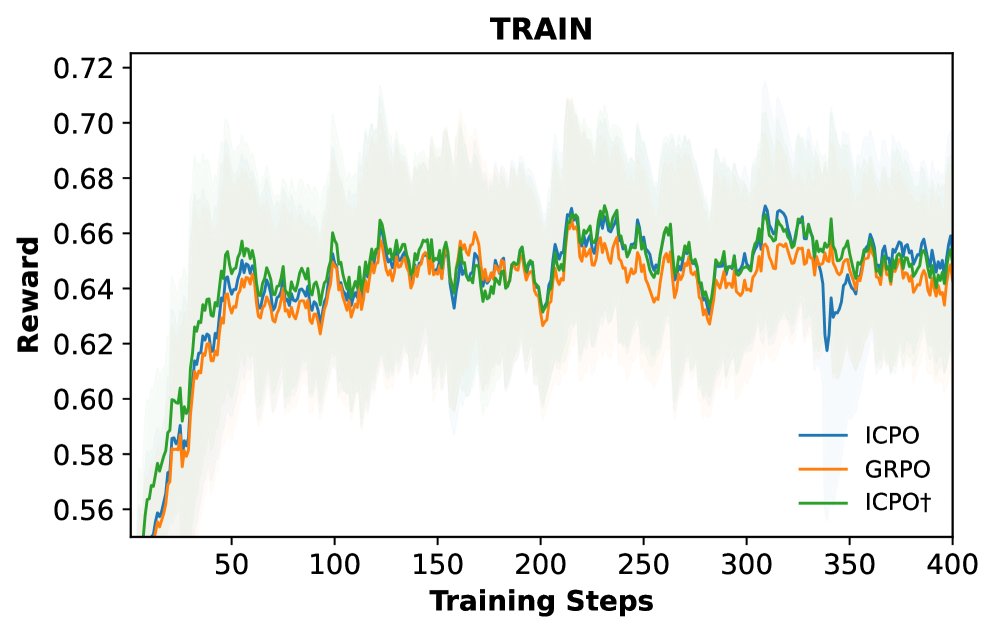
- 训练稳定性: 奖励曲线图显示,ICPO 及其变体在整个训练过程中始终能获得比 GRPO 更高的奖励,表明其优化过程更稳定、更高效。
消融研究与分析
- 各组件的贡献: 逐个移除 ICPO† 的三个组件(IEF、ERRS、RS)后,模型性能均出现下降。其中,IEF 带来了最大的性能增益,证明了利用 ICL 进行专家引导是该框架最核心、最有效的创新。ERRS 和 RS 则分别在过滤噪声和稳定优化方面起到了关键的补充作用。
| 方法 (Qwen3-8B) | NuminaMath | R1-M H./Mnrv. | GSM8K | R1-M Easy | 平均 |
|---|---|---|---|---|---|
| ICPO† | 92.00 | 56.15 / 40.94 | 92.00 | 51.47 | 66.51 |
| - RS (即 ICPO) | 92.00 | 55.21 / 43.65 | 86.95 | 51.10 | 65.78 |
| - ERRS | 89.60 | 55.21 / 41.67 | 85.16 | 53.31 | 64.99 |
| - IEF (即 GRPO) | 91.00 | 54.79 / 38.54 | 83.75 | 50.74 | 63.76 |
- 与外部专家模型的比较: 与依赖先进 LRM 生成轨迹的 LUFFY 方法相比,ICPO 在不使用任何外部模型的情况下,仅凭 IEF 就取得了更优的性能,证明了 ICPO 是一种成本效益更高、更具可扩展性的方案。
- 对不同难度数据的泛化性: 实验表明,无论是在简单的还是困难的推理数据集上进行训练,IEF 都能稳定地提升 GRPO 的性能,证明了该方法的普适性。
总结
实验结果有力地证明,ICPO 是一个可扩展且高效的 RLVR 范式。它通过巧妙地利用模型固有的上下文学习能力,成功地解决了传统 RL 方法在探索上的局限性,并且无需依赖昂贵且不易获取的外部专家模型,为大推理模型的后训练提供了一条新的有效路径。